【实验室介绍】
实验室主要围绕机器人智能控制、智能感知、多传感器融合、机器人人机交互控制技术等领域开展研究。
【主要成员介绍】
【承担课题研究(部分)】
1、国家自然科学基金项目:基于ZnO/P(VDF-TrFE) 薄膜体声波谐振器的柔性触觉传感器
2、广东省自然科学基金项目:基于压电驱动的大功率LED主动散热装置的研究
3、广东省公益研究与能力建设专项:基于弹性驱动器的可穿戴仿生腿研制
4、广东高校省级重点平台和重大科研项目:基于机器视觉的工业机器人位置伺服控制研究
5、中山市社会公益与基础研究项目重点项目:多模态人机交互控制的移动协作机器人关键技术研究
【论文及专利(部分)】
[1] Improved Kernel Correlation Filter Based Moving Target Tracking for Robot Grasping. IEEE Transactions on Instrumentation and Measurement, 2022, vol. 71, pp. 1-12.
[2] Exploiting Semantic and Boundary Information for Stereo Matching[J]. Journal of Signal Processing Systems, 2021(4):1-13.
[3] Design and analysis of a slider-level piezoelectric sensor array for head-disk contact detection, IEEE Transactions on Magnetics, 49(6), 2013.
[4] Analytical solutions to flexural vibration of slender piezoelectric multilayer cantilevers. Smart Materials and Structures, 23(9), 2014.
[5] OFGST-Swin: Swin Transformer utilizing Overlap Fusion-based Generalized S-Transform for Respiratory Cycle Classification[J]. IEEE Transactions on Instrumentation and Measurement, 2024.
[6] LungNeXt: A novel lightweight network utilizing enhanced mel-spectrogram for lung sound classification[J]. Journal of King Saud University-Computer and Information Sciences, 2024, 36(8): 102200.
【科研成果(部分)】

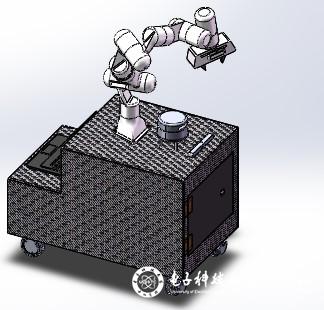
项目组自行开发的移动机械臂平台

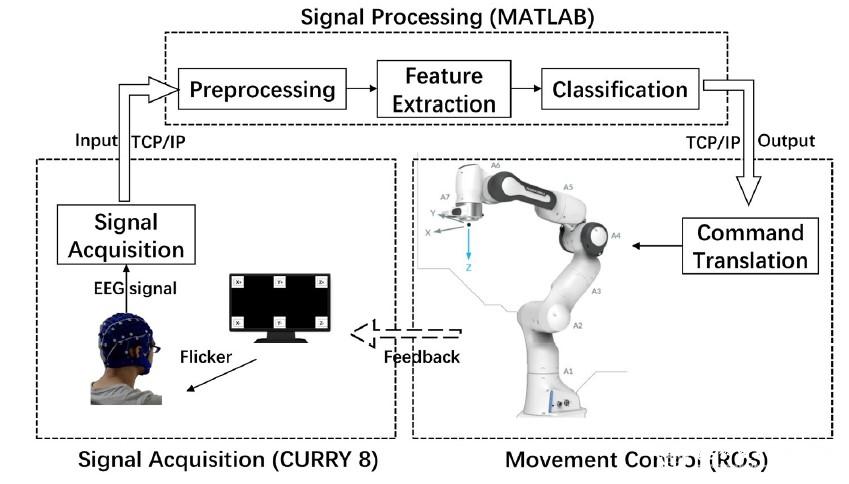
肌电臂环与视觉融合控制协作机器人抓取 机器人脑机接口控制系统
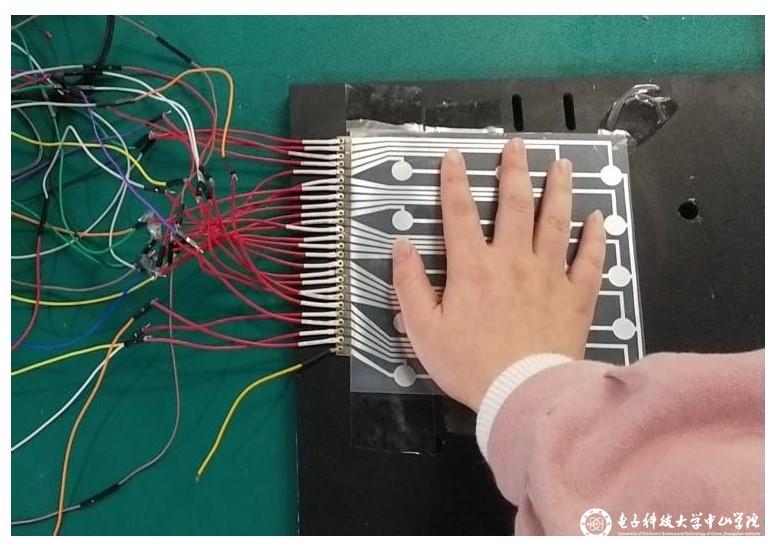
基于ZnO/P(VDF-TrFE) 薄膜体声波谐振器的柔性触觉传感器