【实验室介绍】
本实验室紧密围绕机器人及人工智能产业及研发需求,以广东省智能检测与智能装备工程技术研究中心、广东省智能检测与机器人智能控制工程技术研究中心为依托,通过科产教融合方式服务科研、教学以及产业,培养研究生与本科生,针对智能机器人产业核心关键问题开展研究。主要研究领域包括:基于多传感器融合的动态环境的SLAM与导航技术研究,面向多楼层复杂场景的服务机器人自主导航,移动机器人故障诊断及其容错导航技术,多机器人编队及协作,三维光雷达点云匹配及环境建模,移动机器人远程监控与异常检测,基于GPS的未知环境建图及路径规划等。相关研究成果发表在中国科学、自动化学报、电子学报、ICRA等知名刊物及国际顶级会议上,获得专利及软件著作权30余项。
【成员介绍】
【论文及专利(部分)】
[1] 移动机器人软故障检测与补偿的自适应粒子滤波算法[J],中国科学:信息科学,第38卷第4期,2008年
[2] 不完备多模型混合系统故障诊断的粒子滤波算法[J],自动化学报,第34卷第5期,2008年
[3] Feature-based SLAM for Dense Mapping[J],Proceedings of the 2019 Intemational Conference on Advanced Mechatronic Systems, Kusatsu, Shiga,Japan, August 26-28,2019
[4] Study on Slam Algorithm Based on Object Detectionin Dynamic Scene, Proceedings of the 2019 International Conference on Advanced Mechatronic Systems, Kusatsu, Shiga, japan, August 26 -28,2019
[5] 激光雷达异常检测及鲁棒测量模型[J],系统仿真学报,第20卷第6期,2008年
【获奖荣誉(部分)】







【科研成果(部分)】
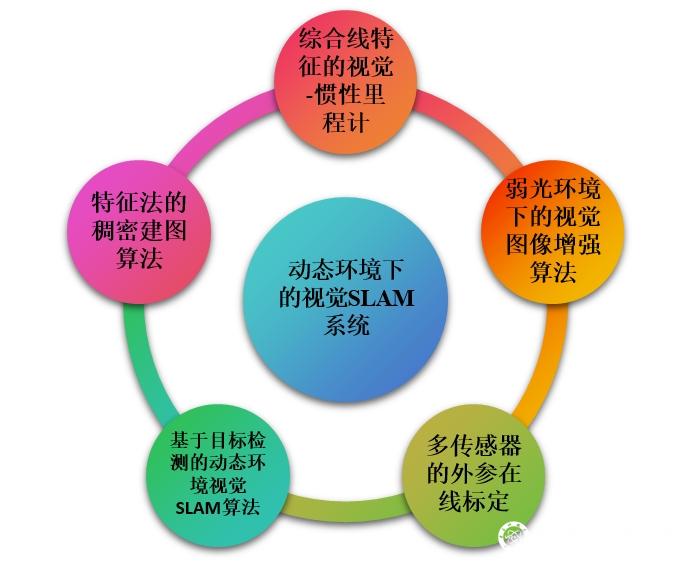

面向动态环境的视觉SLAM关键技术研究
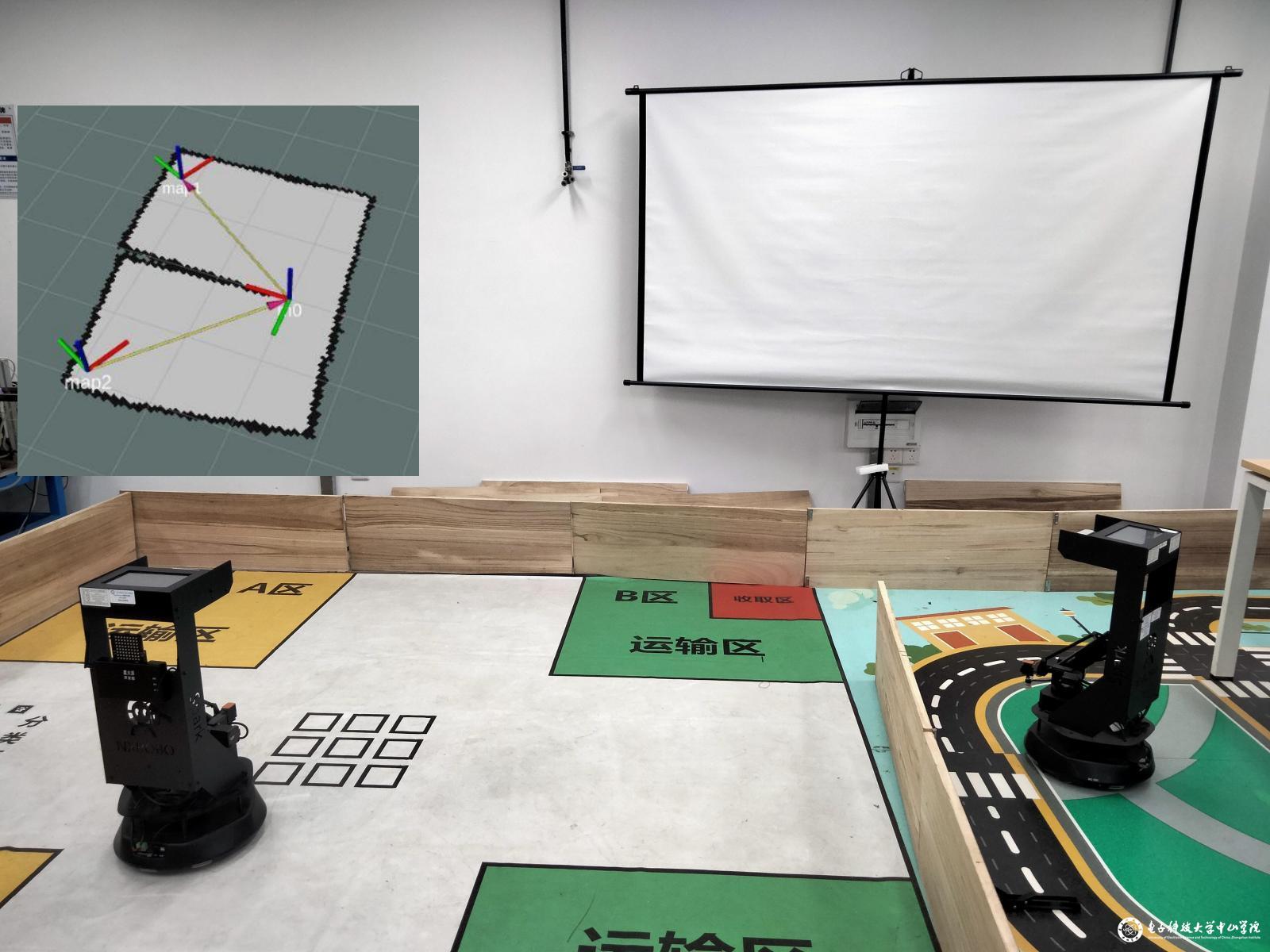

多机器人机器人协作环境建模、多移动机器人编队控制